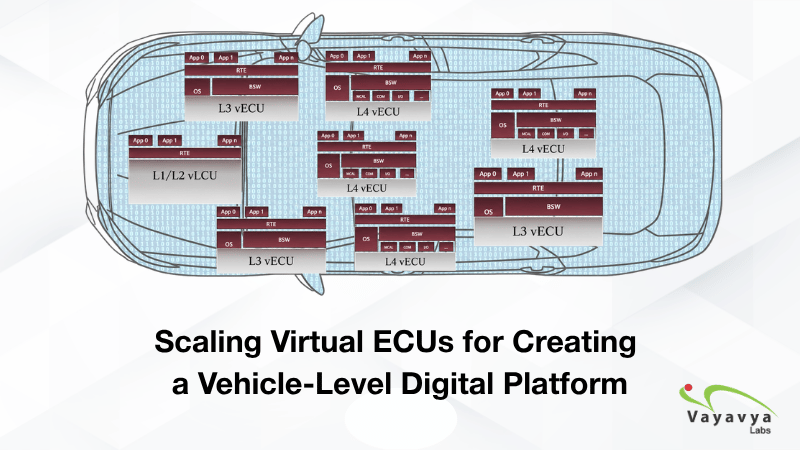
The L1-through-L4 vECU taxonomy is well understood: an L4 vECU faithfully executes the full software stack — application, RTE, BSW, MCAL, OS - against a modelled hardware target. We have built and deployed these across multiple simulator platforms (Synopsys Virtualizer, Cadence VLab Works, QEMU, CHARM, etc) for SoC vendors, Tier-1s, and OEMs. At the individual ECU level, the problem is largely solved.
What remains a challenge is the step from one vECU to a vehicle-level digital platform - dozens of ECUs, interconnected via CAN, LIN, and automotive Ethernet, running against plant models that represent the physical vehicle. This is where the high-value bugs live. Does gPTP (802.1AS) elect the correct grandmaster across the Ethernet backbone? Does ERPS/RSTP failover behave correctly on link loss? When an ADAS ECU computes a torque demand for hill assist, does the chassis vECU adjust wheel torque consistently with what the EMS vECU reports as available engine torque? These are emergent behaviours. No amount of single-ECU fidelity surfaces them.
The conventional alternatives - in-vehicle testing, bench testing, HIL - all depend on physical ECU and harness availability, which pushes execution late in the V&V schedule where the cost of finding bugs is highest. A vehicle-level digital platform removes that dependency by replacing real ECUs with vECUs at appropriate fidelity levels, replacing physical harnesses with virtual communication buses, and replacing physical vehicle attributes with simulation plant models. The V&V window shifts forward by months.
In practice, purely virtual setups are not always feasible. Hybrid configurations - where physical ECUs and vECUs coexist through virtual-to-real bus interfaces are often the pragmatic path. As a case in point: an L3 vECU in a hybrid setup runs actual production application software, which makes it fundamentally superior to traditional restbus simulation. Test cases written for vehicle-level or HIL testing can be reused directly against the hybrid configuration.
The engineering challenges at this scale are specific and non-trivial. Multi-vendor vECU interoperability needs standards like FMI. The virtual bus layer must handle abstraction-level mismatches (simulated CAN vs. physical CAN, FMI vs. ROS2 interfaces). Virtual-time-to-real-time synchronization introduces artefacts that distort timing-sensitive protocol behaviour. HIL systems from most vendors are effectively black boxes with limited integration APIs. We have addressed these in deployments that span on-prem setups, cloud-based environments on AWS (including heterogeneous ARM Graviton + x86 configurations for AD stack V&V), and hybrid combinations of both.
The trajectory here is clear: vehicle-level digital twins that enable CI/CD pipelines to qualify post-production software changes across the complete EE architecture. The technical building blocks exist. The gap is system-level engineering expertise - the ability to stitch vECUs, plant models, virtual buses, and test orchestration into a coherent platform.